
کنترلر PID یکی از ابزارهای اساسی در سیستمهای کنترل صنعتی به شمار میآید. این کنترلر با بهرهگیری از سه مؤلفه اصلی، شامل تناسبی (P)، انتگرالی (I) و مشتقی (D)، قادر است تا خروجی یک سیستم را به مقدار مورد نظر و مطلوب برساند. به عبارت دیگر، کنترلر PID با تنظیم دقیق این سه مؤلفه، میتواند رفتار سیستم را به گونهای مدیریت کند که نوسانات و خطاها کاهش یابد و سیستم به عملکرد ایدهآل نزدیکتر شود. استفاده از این کنترلر در صنایع مختلف به بهبود کارایی و دقت در فرآیندها کمک شایانی میکند و به همین دلیل، آن را جزء ابزارهای حیاتی در کنترل خودکار سیستمها میدانند.
کنترلر PID چیست و نحوه کارکرد آن؟
کنترلر پی آی دی PID (Proportional–Integral–Derivative) که به اختصار برای کنترل تناسبی، انتگرالی و مشتقی شناخته میشود، یکی از ابزارهای کلیدی در فرآیندهای صنعتی به شمار میآید. این کنترلر برای بهینهسازی عملکرد سیستمها و تنظیم خروجی آنها به کار میرود. هدف اصلی کنترلر PID کاهش خطا بین مقدار مورد نظر (Set Point) و مقدار واقعی خروجی سیستم است. با استفاده از این کنترلر، میتوان به دقت بیشتری به وضعیت مطلوب دست یافت و از نوسانات ناخواسته جلوگیری کرد. به این ترتیب، کنترلر PID نه تنها به بهبود کارایی سیستمها کمک میکند، بلکه باعث افزایش ثبات و کاهش هزینههای عملیاتی نیز میشود. در نهایت، این کنترلر به عنوان ابزاری کارآمد در صنایع مختلف، نقش مهمی در فرآیندهای کنترلی ایفا میکند. این کنترلر با استفاده از 3 فاکتور کلیدی، به تدریج و به دقت وضعیت سیستم را تنظیم میکند:
1. کنترل تناسبی (Proportional – P)
بخش تناسبی یک کنترلر به میزان خطا، که شامل تفاوت بین مقدار تنظیمشده و مقدار واقعی است، وابسته است. به عبارتی، هرچه این خطا بزرگتر باشد، خروجی بیشتری از بخش تناسبی تولید میشود. این بخش در تلاش است تا با توجه به وضعیت کنونی، خطا را به طور سریعتری کاهش دهد. به همین دلیل، عملکرد این بخش به گونهای است که سعی میکند تا با تجزیه و تحلیل مقدار فعلی، به کاهش فاصله بین مقدار مطلوب و مقدار موجود کمک کند. این فرآیند در واقع به کنترل بهتر سیستم و بهبود عملکرد آن منجر میشود. در نتیجه، بخش تناسبی نقش کلیدی در تنظیمات و واکنشهای سیستم ایفا میکند و میتواند تاثیر بسزایی در پایداری و دقت عملکرد داشته باشد.
2. کنترل انتگرالی (Integral – I)
برای برطرف کردن مشکل خطای باقیمانده که ممکن است ناشی از کنترل تناسبی باشد، استفاده از بخش انتگرالی بسیار مؤثر است. این بخش به گونهای طراحی شده است که بر اساس مجموع خطاهای قبلی عمل کرده و به سیستم کمک میکند تا حتی کوچکترین تفاوت میان مقدار مطلوب و مقدار واقعی را از بین ببرد. با این روش، سیستم قادر است تا خطاهای بلندمدت را شناسایی و اصلاح کند و در نهایت خروجی را به مقدار دقیق تنظیمشده نزدیکتر کند. این مکانیزم به طور کلی به بهبود دقت عملکرد سیستم کمک میکند و اطمینان حاصل میکند که نتایج حاصل از فرآیند به استانداردهای مورد نظر نزدیکتر است. در واقع، این بخش انتگرالی نقش کلیدی در بهینهسازی عملکرد سیستمها ایفا میکند و میتواند به کاهش نوسانات و خطاهای سیستماتیک منجر شود.
3. کنترل مشتقی (Derivative – D)
بخش مشتقی در سیستمهای کنترل به بررسی سرعت تغییر خطا پرداخته و نقش مهمی در واکنش سریع سیستم دارد. هنگامی که خطا به طور ناگهانی و با شدت بالا تغییر کند، بخش مشتقی با تولید سیگنالهای مناسب به سیستم کمک میکند تا به سرعت واکنش نشان دهد و از نوسانات و تغییرات ناخواسته جلوگیری کند. این عملکرد به بهبود کنترل و پایداری سیستم کمک میکند و به ویژه در مواقعی که سیستم با تغییرات غیرمنتظره و ناگهانی روبرو میشود، اهمیت بیشتری پیدا میکند. به عبارتی، بخش مشتقی به عنوان یک ابزار کلیدی در حفظ ثبات و کارایی سیستمهای کنترل عمل میکند.
بیشتر بخوانید: سافت استارتر چیست و چه کاربردی دارد؟
نحوه کارکرد کنترلر PID
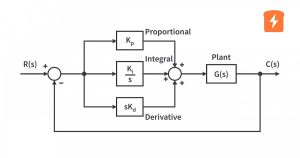
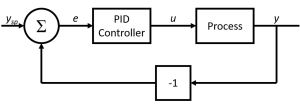
کنترلر PID با بهکارگیری سه مؤلفه اساسی یعنی تناسبی (P)، انتگرالی (I) و مشتقگیر (D)، قادر به تولید یک سیگنال کنترلی است که به سیستم فرستاده میشود تا خروجی آن به مقدار مطلوب نزدیک گردد. در عمل، این کنترلر بهطور مداوم خطا را اندازهگیری کرده و بر اساس شدت و تغییرات آن، سیگنالی را ایجاد میکند که به تنظیم و بهینهسازی خروجی سیستم کمک میکند. به این ترتیب، کنترلر PID با واکنش سریع و هوشمندانه به تغییرات، میتواند عملکرد سیستم را بهبود بخشد و آن را در مسیر صحیح هدایت کند. این فرآیند باعث میشود که خروجی سیستم به تدریج به هدف تعیینشده نزدیکتر شود و از نوسانات غیرضروری جلوگیری گردد.
این کنترلر به نحوی طراحی شده است که نوسانات خروجی را به حداقل میرساند و به سیستم این امکان را میدهد که به آرامی و با ثبات به مقدار مورد نظر دست یابد. در صورتی که هر یک از سه فاکتور اصلی به درستی تنظیم نشوند، ممکن است سیستم با مشکلاتی نظیر نوسانهای شدید یا زمان طولانی برای رسیدن به نقطه مطلوب مواجه گردد. این موضوع اهمیت بالایی دارد، زیرا عدم تنظیم صحیح میتواند کارایی کل سیستم را تحت تأثیر قرار دهد و به ناپایداری و اختلال در عملکرد آن منجر شود. به همین دلیل، دقت در تنظیم این پارامترها برای دستیابی به عملکرد بهینه و پایدار ضروری است.